
El pasado día 24 de marzo de 2023 realicé la defensa de este Trabajo de Final de Grado que podéis consultar en el siguiente enlace: https://riunet.upv.es/handle/10251/192643
A día de hoy existen soluciones como Google con Google Maps que permiten la geolocalización mediante técnicas de Visión por Computador e Inteligencia Artificial, pero no hay mucho desarrollado para espacios públicos o privados de interior.
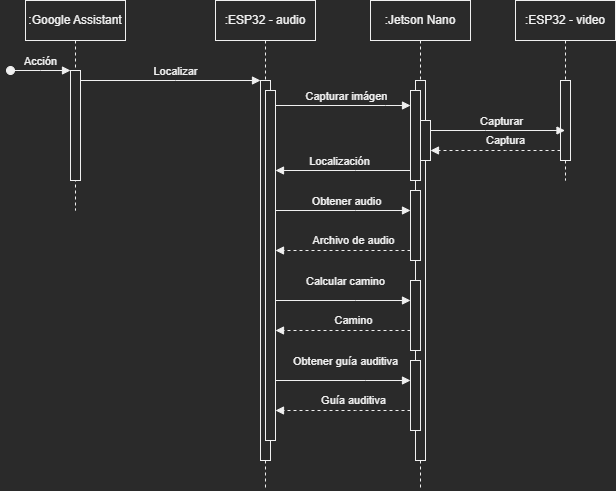
En el proyecto se tomaron dos microcontroladores ESP32 junto a una Jetson Nano y se programaron para la realización de peticiones HTTP a la API. Un microcontrolador ESP32 es el encargado de actuar como servidor web de vídeo y la otra placa ESP32 la encargada de realizar la reproducción del sonido y recepción de instrucciones. Como puede escucharse en el siguiente audio:
En la siguiente imagen podéis ver el diagrama de flujo:
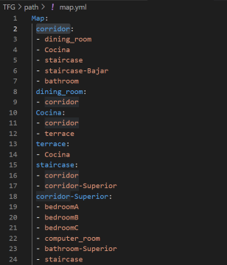
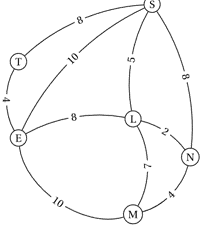
El cálculo del camino más corto se realizó transformando el mapa del espacio de interior en un fichero YAML y posteriormente en un grafo. Mediante el algoritmo Dijkstra se calcula el camino más corto.
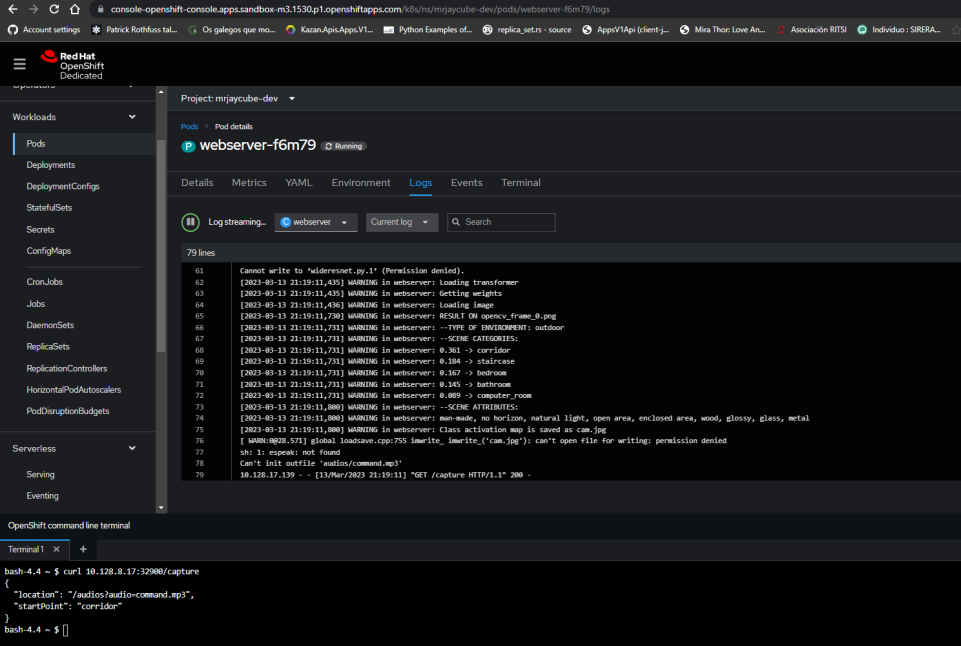
Por último realicé un despliegue en Openshift y en el futuro podría realizarse un procesamiento por streaming de forma que cada vez que un usuario realizara una petición se generaría un contenedor ad-hoc para el usuario que sería destruido una vez realizada la guía. Reduciendo consumo y protegiendo la identidad y privacidad del usuario.
